+7 (495) 540-59-02
下载PDF
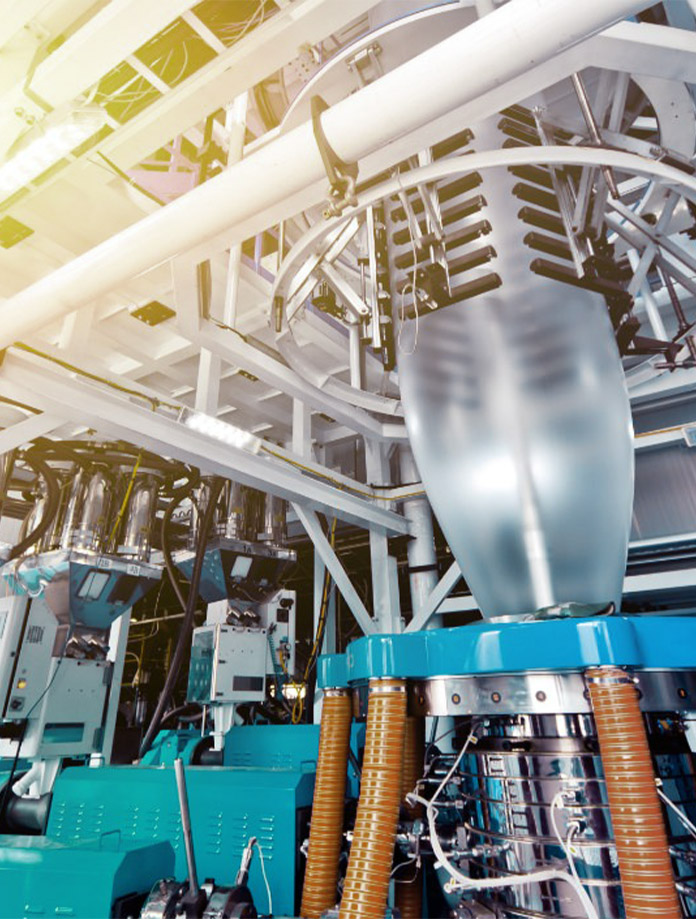
JSC AVK 是俄罗斯和独联体国家化工产品市场的领导者之一。公司专业为油气炼制、石化和化学工业供应催化剂、吸附剂、添加剂和其他化学试剂。
info@avkavk.ru
莫斯科,Presnenskaya 路堤,12MFC“联邦大厦。东方”
AVK 研发中心的员工负责配方和技术的开发和改进。
AVK 研发中心是公司的一个多学科分支机构,由以下部分组成:
研发中心聘用高素质的专家:理科候选人、化学家-技术专家、物理化学家和材料科学家,他们都毕业于国内一流大学。
研究中心的专家和员工创建并实施了 40 多项与新产品发布或其彻底现代化相关的原创技术解决方案。
化学博士,首席专家;莫斯科国立罗蒙诺索夫大学化学系创新活动部副主任
化学博士;"催化裂化化学与技术 "方向负责人
化学博士,教授;莫斯科国立罗蒙诺索夫大学化学系实验室主任
化学博士;"燃料添加剂和润滑剂"方向负责人
Заполните заявку и мы свяжемся с вами в ближайшее время.
填写申请表,我们会尽快与您联系。
Пожалуйста, введите данные для регистрации на сайте.
Пожалуйста, введите логин и пароль для авторизации на сайте












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}