АО «АВК» — один из лидеров на рынке химических продуктов России и стран СНГ. Компания специализируется на поставках катализаторов, адсорбентов, присадок и прочих химических реагентов на предприятия нефтегазоперерабатывающей, нефтехимической и химической промышленностей.
Продукты
Контакты
+7 (495) 540-59-02
info@avkavk.ru
Москва, Пресненская набережная, 12 МФК «Башня Федерация. Восток»
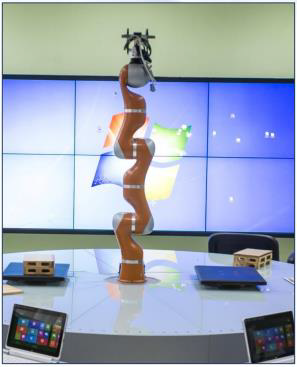
Промышленные технологические роботы KUKA KR100 и KR16
Данные роботы демонстрируют работу наиболее распространённой в промышленности серии роботов. Роботы оснащены пневматическими захватами, что позволяет отрабатывать задачи правильного позиционирования инструмента относительно деталей, различные типы движений и задачи по перемещению заготовок.
KUKA LBR4+
Электродуговая сварка
Инструмент имитации процесса электродуговой сварки с помощью свечения диодов и щелчков реле сварочной горелки, при соприкосновении сварочной проволоки с заготовкой.
Лазерная резка
Инструмент имитации процесса лазерной резки с помощью излучательного модуля (лазера). Оснащён ультразвуковым датчиком для измерения расстояния между головой инструмента и поверхностью обрабатываемой заготовки.
Механообработка
Инструмент имитации процесса механообработки фрезой. Оснащён моделью шпинделя и частотным преобразователем.