





Решения
- Главная
- Решения

Peter Adams
co-founder of company
Научные партнеры

Коллаборация МГТУ СТАНКИН и АО «АВК»
Совместная работа МГТУ СТАНКИН, как центра знаний и компетенций, и АО «АВК», как полиотраслевого индустриального партнера интегратора, позволяет эффективно выявлять актуальные запросы отраслей на средства автоматизации и новые технологии, оперативно разрабатывать, испытывать и внедрять решения, отвечающие самым современным требованиям промышленности и позволяющие реализовывать опережающие темпы технологического развития.
В рамках коллаборации работают:
- Центр промышленной автоматизации и робототехники;
- Инженерно-испытательная лаборатория;
- Программы переподготовки кадров для обучения специалистов наладчиков и операторов РТК.
Центр промышленной автоматизации и робототехники:
- Разработка многофункциональных универсальных роботизированных платформ коллаборативного типа для промышленного применения в судостроительной и судоремонтной отраслях, а так же в нефте-газоперерабатывающей и добывающей промышленности, в отраслях индустриального и инфраструктурного строительства;
- Разработка и модернизация автоматизированных линий для обрабатывающих отраслей промышленности;
- Адаптация оборудования технологического воздействия для применения в составах роботизированных комплексов;
- Разработка систем машинного контроля качества производимых работ в том числе с применением технологий искусственного интеллекта;
- Разработка и реализация программ переподготовки специализированных кадров.
Комплексные программы переподготовки кадров для обучения специалистов наладчиков и операторов РТК
- Устройство и применение РТК;
- Эксплуатация и обслуживание РТК.
{kind=link}
{kind=link}
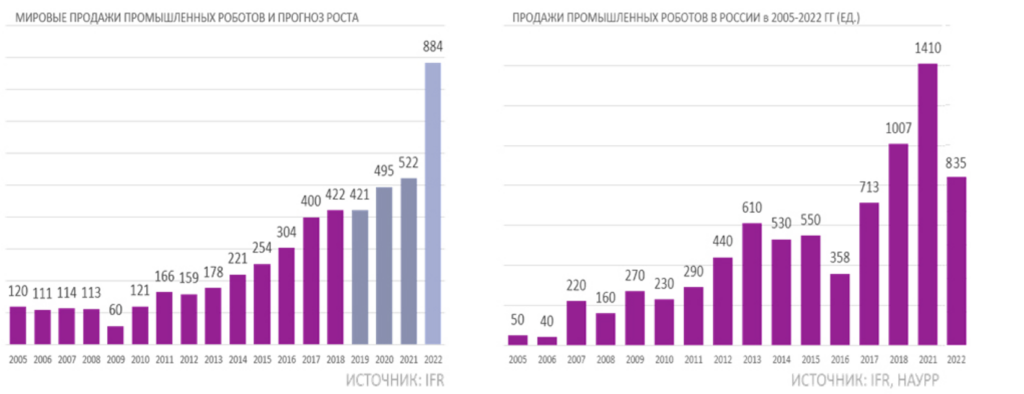
Темпы внедрения промышленной роботизации в мире и России
Актуальность применения робототехнических комплексов для доставки технологического воздействия
- Повышение качества покрытий за счет компьютерной точности и интеллектуальных алгоритмов осуществления воздействия;
- Снижение вовлечения ручного труда;
- Высокая производительность;
- Возможность осуществления доставки воздействия в труднодоступные, высотные, опасные для здоровья и жизни человека объекты;
- Снижение расхода материалов;
- Обеспечение непрерывности рабочего процесса;
- Автоматизированный контроль качества;
- Обеспечение повторяемости технологических процессов;
- Дистанционный мониторинг процессов.
В структуре НИЦ организована инженерно-испытательная лаборатория по отработке различных режимов технологического воздействия для мобильных и стационарных робототехнических платформ:
- Поисковые работы для определения, стандартизации и оптимизации режимов обработки поверхностей;
- Определение потенциала внедрения и экономического эффекта применения РТК;
- Отладка технологических карт под конкретные технические требования;
- Опробирование технологий воздействия.

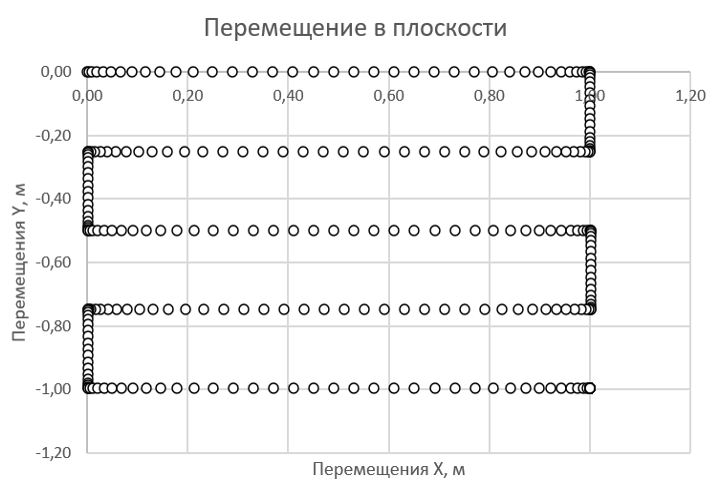
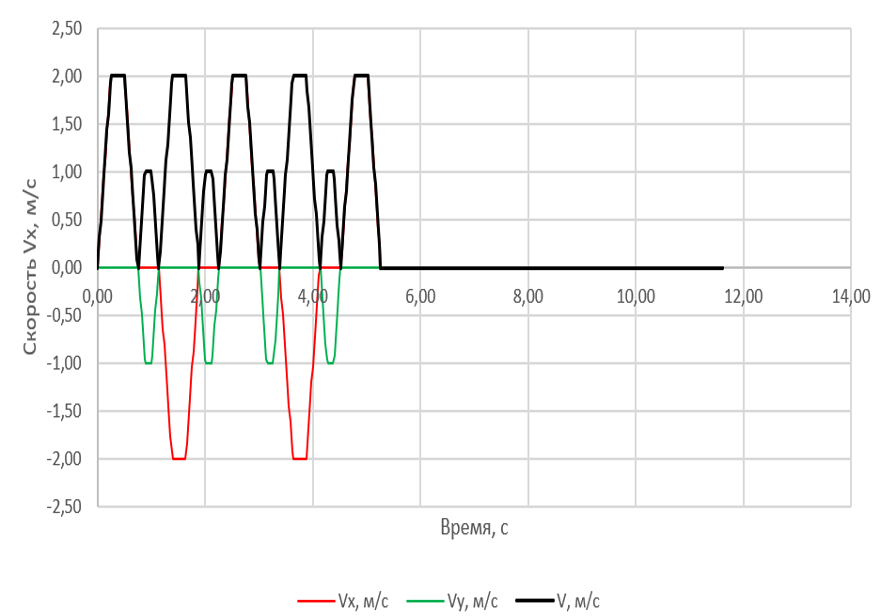
Специалистами НИЦ разработан программный пакет для настройки траектории движения, скорости и цикличности воздействия
- В программном пакете реализован цифровой двойник испытательного стенда, полностью синхронизированный с натурным стендом на базе промышленного манипуляционного робота.
Разработанный пакет формирует программный код управления манипулятором на цифровом двойнике стенда, что позволяет:
- Осуществлять подготовку и проведение серий экспериментов параллельно;
- Гарантировать повторяемость экспериментов;
- Проводить точное изменение параметров позиционирования и движения рабочего органа;
- Документировать эксперименты с сохранением параметров и траекторий.
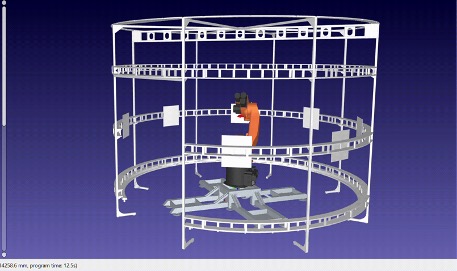
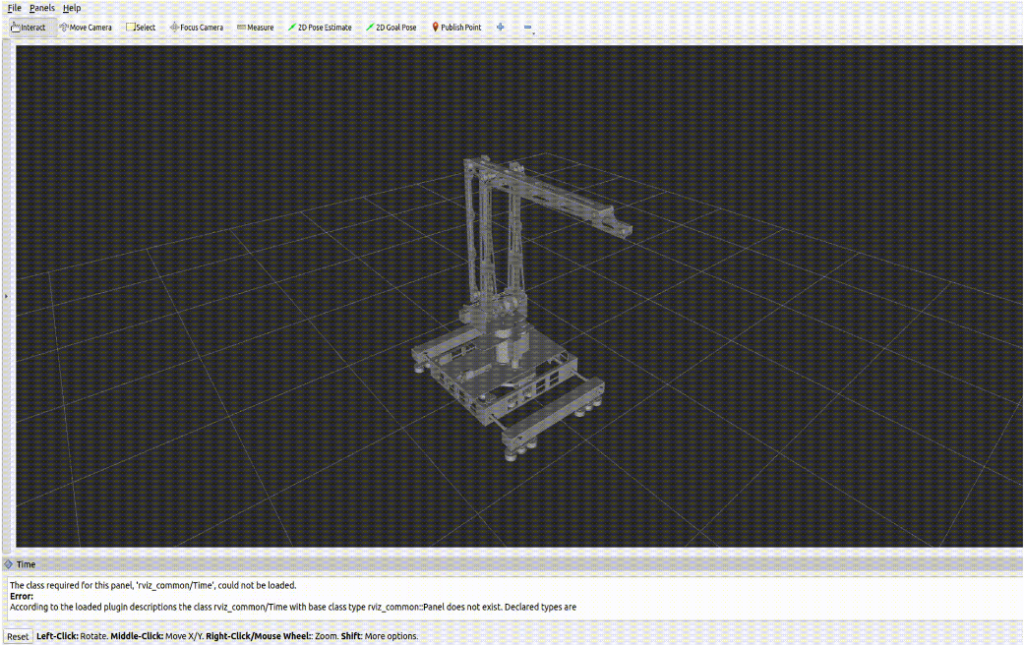
Программный комплекс для отработки различных вариантов траектории движения манипуляторов и шасси РТК с использованием возможностей программного фреймворка для разработки роботов ROS2
- ПО обеспечивает выработку управляющих воздействий на привода в составе манипуляторов и платформ в зависимости от желаемой траектории, скорости и других параметров движения технологического оборудования, размещенного на фланце манипулятора.
- На иллюстрации представлена визуализация траекторного управления фланцем РТК в среде RVIZ пакета ROS2.
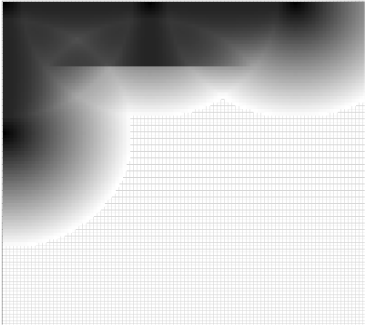
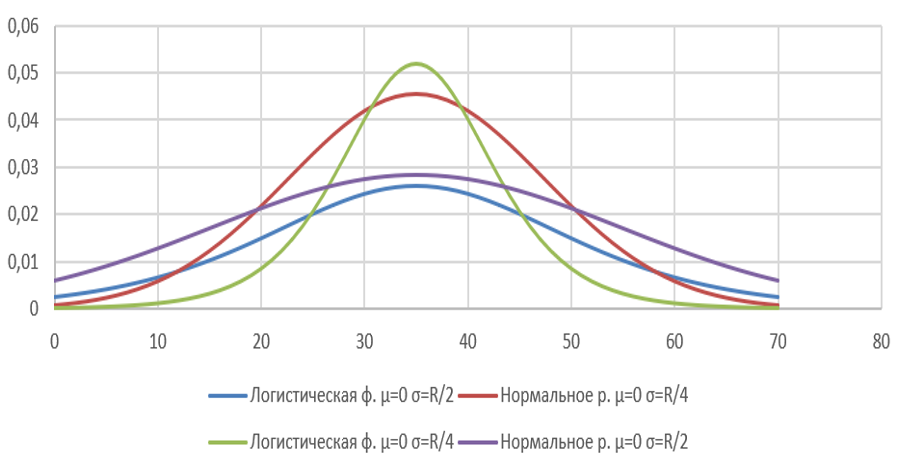
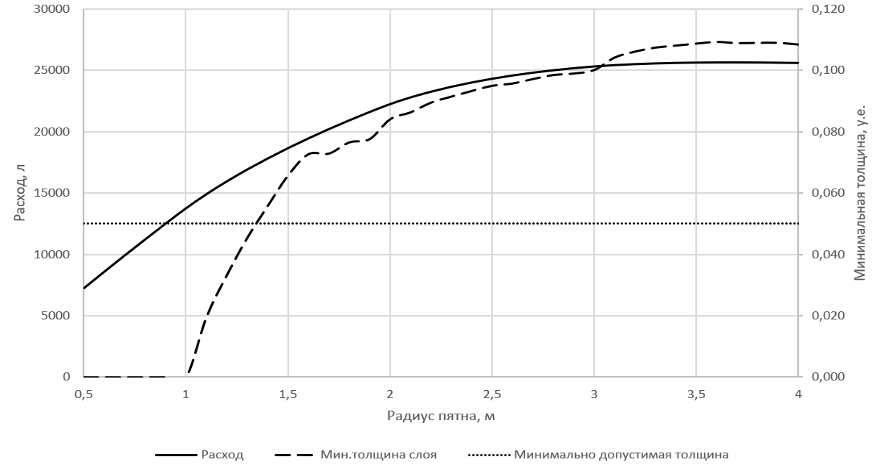
Разработан уникальный математический аппарат для моделирования параметров нанесения защитных покрытий и расчета режимов работы РТК
Моделирование позволяет:
- Оптимизировать траектории и алгоритмы движения РТК по времени обработки;
- Повысить функциональные качества покрытий за счет достижения однородности и заданных параметров толщины;
- Обеспечить экономию материалов;
- Рассчитывать оптимальные режимы обработки для материалов с различными механическими и химическими свойствами.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}