JSC “AVK” is one of the leaders in the chemical products market of Russia and the CIS countries. The company specializes in the supply of catalysts, adsorbents, additives and other chemical reagents to enterprises of the oil and gas refining, petrochemical and chemical industries.
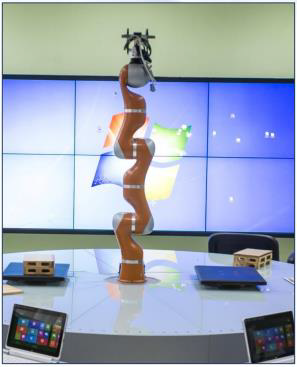
These robots demonstrate the work of the most common series of robots in industry. The robots are equipped with pneumatic grippers, which allows them to work out the tasks of correct positioning of the tool relative to the details, various types of movements and tasks of moving workpieces.
KUKA LBR4+
Electric arc welding
A tool to simulate the process of electric arc welding by means of diodes glowing and welding torch relays clicking when the welding wire comes into contact with the workpiece.
Laser cutting
A tool to simulate the laser cutting process using an emitter module (laser). Equipped with an ultrasonic sensor to measure the distance between the tool head and the surface of the workpiece.
Mechanical processing
Tool for simulating the machining process with a milling cutter. Equipped with spindle model and frequency converter.
Palletizing
Palletizing simulation tool. Equipped with a pneumatic gripping device (vacuum suction).
Mechanical cutting or drawing
Simulated cutting or drawing tool. Equipped with a holder for rigid fixation of a blade or pencil.
Tool calibration
Calibration tool. Equipped with two calibrators.
Tool calibrationSensitive Schunk 3-fingers hand.
A 3-finger sensing gripper that allows you to adjust the gripping force and also identify the type of object being grasped.
Key features of the Schunk 3-fingers:
Accurate capture of complex shaped parts
Secure grip of a group of parts
Flexible software speed control
Flexible software control of finger pressure
Flexible software control of finger positioning
Ability to perform various capture scenarios
Search for the optimal position of the captured object