





Ножничный ртк
- Главная
- Ножничный ртк

Отрасли применения РТК
- Судостроение и судоремонт;
- Нефте-газо добыча;
- Нефте-газо переработка;
- Индустриальное строительство.
Комплексные решения мобильных робототехнических универсальных платформ для доставки технологического воздействия
Для повышения эффективности, сокращения сроков и стоимости работ разработан комплекс технических и технологических решений, основанный на использовании современных цифровых промышленных технологий и оборудования для их реализации.
Промышленное применение РТК:
- Лазерная очистка поверхности;
- Дробе-пескоструйная обработка;
- Нанесение лакокрасочных покрытий;
- Нанесение металлизационных покрытий;
- Нанесение противоскользящих, термоизоляционных и антиобледенительных покрытий;
- Неразрушающий контроль;
- Иные специфичные технологические операции по ТЗ Заказчика.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
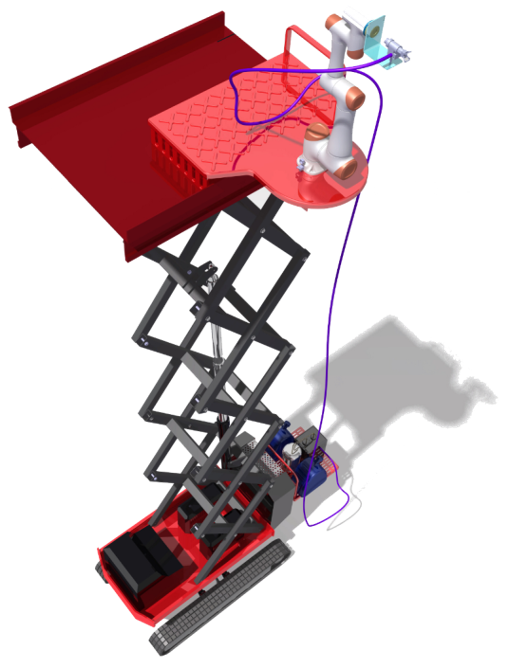
Принцип действия:
- Представляет собой гусеничную платформу с ножничным подъемником, оборудованную многоосевым манипулятором.
Применение:
- На высоких, протяженных, вертикальных поверхностях, в том числе со сложным выгнутым или вогнутым рельефом;
- Возможность обработки отдельных выступающих над поверхностью или утопленных вглубь элементов конструкции.
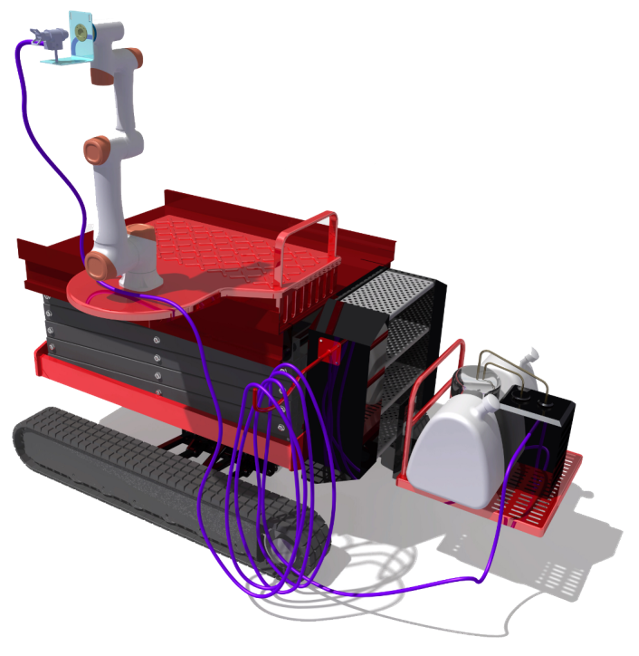
Навесное оборудование:
- Лазерная очистка;
- Дробе-пескоструйная; обработка;
- Окраска;
- Металлизация;
- Машинный контроль.
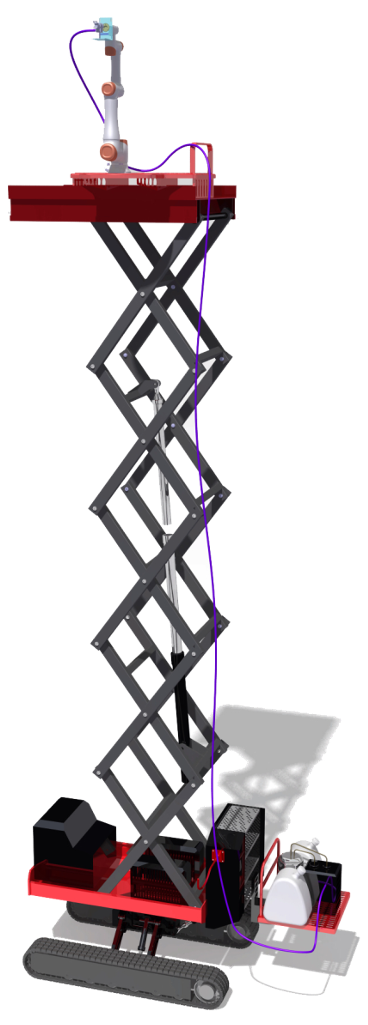
Особенности:
- Высокая грузоподъемность;
- Возможность размещения на фланце манипулятора нескольких органов технологического воздействия для увеличения производительности;
- Возможность работы на наклонных опорных поверхностях.
{kind=link}
{kind=link}
{kind=link}
Характеристика | Значение |
Грузоподьемность платформы | 300 kg |
Максимальная рабочая высота | 10.0 m |
Максимальная высота пола платформы | 8.0 m |
Высота перемещения | 6.5m |
Ходовая часть | Двухуровневая |
Выравнивание корзины | Автоматически |
Продольное выравнивание Передняя часть | +/- 15° |
Продольное выравнивание Заднее | +/- 20° |
Боковое выравнивание | +/- 14° |
Система динамического нивелирования | Да |
Проактивная система нивелирования | Да |
Система контроля направления | Да |
Контроль наклона | Автоматически |
Уклоняемость | 25° |
Боковой уклон | 21° |
Длина | 2.27 m |
Ширина | 1.46 ÷ 1.64 m |
Минимальная высота | 2.09 (1,75) m |
Общий вес | 2900 kg |
Манипулятор | |
Вес | 37 кг |
Полезная нагрузка | 16 кг |
Радиус рабочей зоны | 1000 мм |
Макс. скорость TCP | 3 м/с |
Интерфейсы на фланце | RS485 |
Повторяемость позиции | ±0.03 мм |
Питание | 100-240В переменного тока, 50-60 Гц |
Интерфейсы | TCP/IP, Modbus, EtherCAT, WIFI |
Класс защиты | IP IP54 |
Температура эксплуатации | 0 ℃~ 45 ℃ |
Потребляемая мощность | 350 Вт |
Материалы изготовления | Алюминиевый сплав, АБС-пластик |
Требуется консультация?
Комплексные решения мобильных робототехнических универсальных платформ для доставки технологического воздействия:
Для повышения эффективности, сокращения сроков и стоимости работ разработан комплекс технических и технологических решений, основанный на использовании современных цифровых промышленных технологий и оборудования для их реализации.
Промышленное применение РТК:
- Лазерная очистка поверхности;
- Дробе-пескоструйная обработка;
- Нанесение лакокрасочных покрытий;
- Нанесение металлизационных покрытий;
- Нанесение противоскользящих, термоизоляционных и антиобледенительных покрытий;
- Неразрушающий контроль;
- Удаление органических отложений без повреждения ЛКП;
- Иные специфичные технологические операции по ТЗ Заказчика.
Построение многофункциональных РТК по принципу универсальных платформ для доставки технологического воздействия
- РТК разработаны в виде линейки мобильных платформ для обработки максимально широкого диапазона форм, габаритов, материалов и пространственных ориентаций поверхностей;
- РТК разработаны с учетом возможности быстрого монтажа и замены технологического оборудования, что позволяет использовать одну платформу для последовательных разнородных операций согласно технологической карте;
- Концепция управления «роем» позволяет выбрать алгоритм последовательной непрерывной обработки поверхностей двумя и более однотипными платформами с использованием разного технологического навесного оборудования согласно очередности типов обработки.
{kind=link}
{kind=link}

Токарев Дмитрий Андреевич
Руководитель проекта: Директор ГИЦ МГТУ "СТАНКИН"
- E-mail:d.tokarev@stankin.ru
- Телефон: +7 (495) 647 59 27