





Тросовый ртк
- Главная
- Тросовый ртк

Отрасли применения РТК
- Судостроение и судоремонт;
- Нефте-газо добыча;
- Нефте-газо переработка;
- Индустриальное строительство.
Комплексные решения мобильных робототехнических универсальных платформ для доставки технологического воздействия
Для повышения эффективности, сокращения сроков и стоимости работ разработан комплекс технических и технологических решений, основанный на использовании современных цифровых промышленных технологий и оборудования для их реализации.
Промышленное применение РТК:
- Лазерная очистка поверхности;
- Дробе-пескоструйная обработка;
- Нанесение лакокрасочных покрытий;
- Нанесение металлизационных покрытий;
- Нанесение противоскользящих, термоизоляционных и антиобледенительных покрытий;
- Неразрушающий контроль;
- Иные специфичные технологические операции по ТЗ Заказчика.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
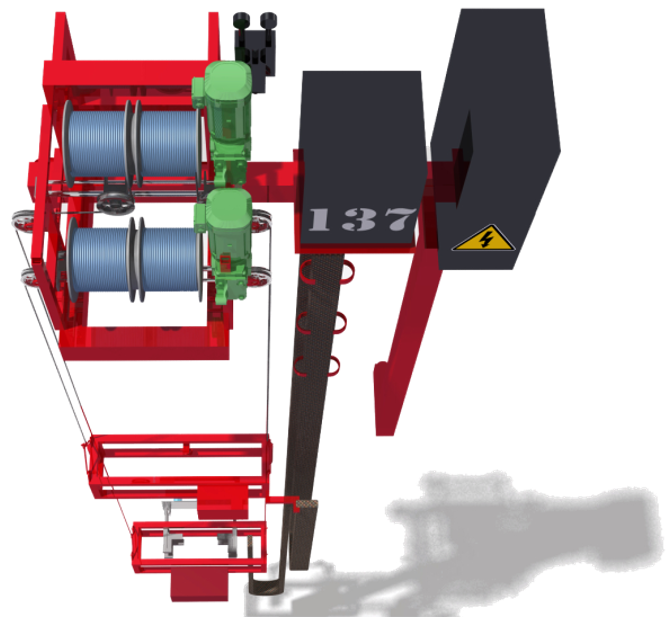
Принцип действия:
- Тросовый, состоит из движущейся по горизонтали верхней станции, опускаемой на тросах нижней станции, и перемещаемой по тросам каретки с оборудованием воздействия.
Применение:
- На высоких, протяженных, относительно ровных вертикальных плоскостях.
Навесное оборудование:
- Лазерная очистка;
- Дробе-пескоструйная; обработка;
- Окраска;
- Металлизация;
- Машинный контроль.
Особенности:
- Высокая производительность за счет скоростного перемещения подвижной каретки с оборудованием технологического воздействия;
- Возможность размещения на каретке нескольких органов технологического воздействия для увеличения производительности.
{kind=link}
{kind=link}
{kind=link}
Характеристика | Значение |
Климатическое исполнение и категория размещения в соответствии с ГОСТ 15150-69 | У1 |
Уклон пути перемещения верхней станции, не более | 2º |
Предельная наибольшая температура эксплуатации | плюс 45 °С |
Предельная наименьшая температура эксплуатации | минус 30 °С |
Режим работы механизма перемещения верхней станции по ГОСТ 34017-2016 | M4 |
Грузоподъемность верхней станции (масса устанавливаемого оборудования), кг | 150 |
Скорость перемещения верхней станции, м/с | 0-0,33 |
Диапазон перемещений верхней станции, м | 0-120 |
Точность позиционирования верхней станции, мм | ± 10 |
Режим работы механизма подъема нижней станции по ГОСТ 34017-2016 | M2 |
Скорость подъема/опускания нижней станции, м/с | 0-1 |
Диапазон перемещений нижней станции, м | 0-10 |
Точность позиционирования нижней станции, мм | ± 10 |
Скорость линейных актуаторов, м/с | 0-0,05 |
Диапазон перемещений актуаторов, м | 0-0,5 |
Точность позиционирования актуаторов, мм | ± 5 |
Система подачи коммуникаций с верхней станции на нижнюю станцию, тип | траковый |
Режим работы механизма подъема каретки по ГОСТ 34017-2016 | М6 |
Грузоподъемность каретки (масса устанавливаемого оборудования), кг | 50 |
Скорость подъема/опускания каретки, м/с | 0-1 |
Диапазон перемещений каретки, м | 0-10 |
Точность позиционирования каретки, мм | ± 10 |
Система подачи коммуникаций с верхней станции на каретку, тип | траковый |
Мощность, кВт, не более | 15 |
Масса МРП (без учета навесного оборудования ), кг, не более | 2200 |
Требуется консультация?
Комплексные решения мобильных робототехнических универсальных платформ для доставки технологического воздействия:
Для повышения эффективности, сокращения сроков и стоимости работ разработан комплекс технических и технологических решений, основанный на использовании современных цифровых промышленных технологий и оборудования для их реализации.
Промышленное применение РТК:
- Лазерная очистка поверхности;
- Дробе-пескоструйная обработка;
- Нанесение лакокрасочных покрытий;
- Нанесение металлизационных покрытий;
- Нанесение противоскользящих, термоизоляционных и антиобледенительных покрытий;
- Неразрушающий контроль;
- Удаление органических отложений без повреждения ЛКП;
- Иные специфичные технологические операции по ТЗ Заказчика.
Построение многофункциональных РТК по принципу универсальных платформ для доставки технологического воздействия
- РТК разработаны в виде линейки мобильных платформ для обработки максимально широкого диапазона форм, габаритов, материалов и пространственных ориентаций поверхностей;
- РТК разработаны с учетом возможности быстрого монтажа и замены технологического оборудования, что позволяет использовать одну платформу для последовательных разнородных операций согласно технологической карте;
- Концепция управления «роем» позволяет выбрать алгоритм последовательной непрерывной обработки поверхностей двумя и более однотипными платформами с использованием разного технологического навесного оборудования согласно очередности типов обработки.
{kind=link}
{kind=link}

Токарев Дмитрий Андреевич
Руководитель проекта: Директор ГИЦ МГТУ "СТАНКИН"
- E-mail:d.tokarev@stankin.ru
- Телефон: +7 (495) 647 59 27