+7 (495) 540-59-02
下载PDF
JSC AVK 是俄罗斯和独联体国家化工产品市场的领导者之一。公司专业为油气炼制、石化和化学工业供应催化剂、吸附剂、添加剂和其他化学试剂。
info@avkavk.ru
莫斯科,Presnenskaya 路堤,12MFC“联邦大厦。东方”
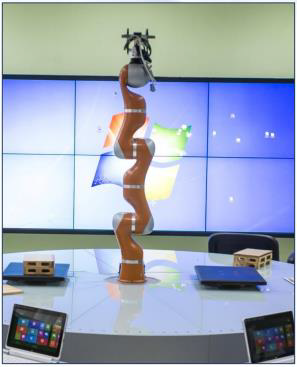
这些机器人展示了工业中最常见的机器人系列的操作。这些机器人配备气动夹具,可用于练习工具与工件的正确定位、各种类型的运动和工件搬运任务。
通过二极管发光和焊丝接触工件时焊枪继电器发出咔嗒声来模拟电弧焊接过程的工具。
利用发射器模块(激光)模拟激光切割过程的工具。配备超声波传感器,用于测量工具头与工件表面之间的距离。
模拟铣刀加工过程的工具。配备主轴模型和变频器。
码垛模拟工具。配备气动抓取装置(真空吸力)。
模拟切割或拉伸工具。配有固定刀片或铅笔的支架。
校准工具。配有两个校准器。
反应灵敏的三指握把,可调节握力并识别被抓物体的类型。
Schunk 三指抓手的主要特点
精确抓取形状复杂的零件
可安全抓取一组零件
灵活的软件速度控制
灵活的手指压力软件控制
灵活的手指定位软件控制
能够执行不同的抓取方案
找到被抓取物体的最佳位置
Заполните заявку и мы свяжемся с вами в ближайшее время.
填写申请表,我们会尽快与您联系。
Пожалуйста, введите данные для регистрации на сайте.
Пожалуйста, введите логин и пароль для авторизации на сайте