+7 (495) 540-59-02
下载PDF
JSC AVK 是俄罗斯和独联体国家化工产品市场的领导者之一。公司专业为油气炼制、石化和化学工业供应催化剂、吸附剂、添加剂和其他化学试剂。
info@avkavk.ru
莫斯科,Presnenskaya 路堤,12MFC“联邦大厦。东方”
为了提高工作效率,缩短工作时间,降低工作成本,在使用现代数字工业技术和设备的基础上,开发了一套技术和工艺解决方案来实现这些目标。
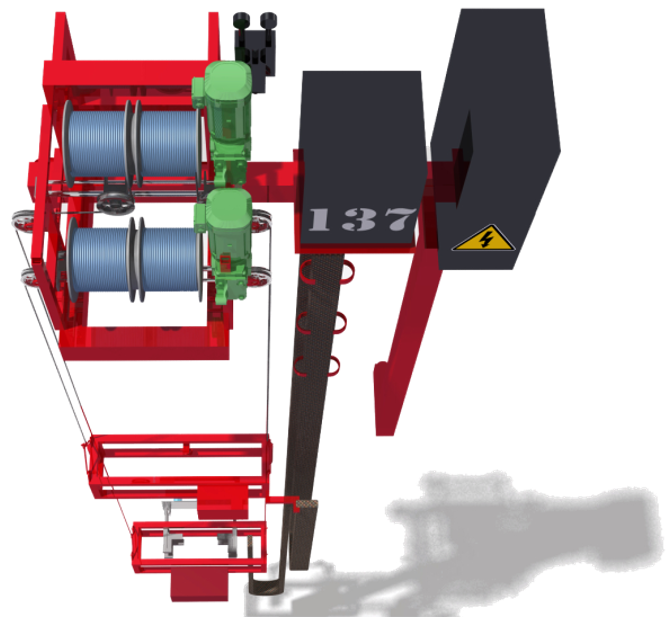
性能:
Значение
根据 GOST 15150-69 规定的气候条件执行和安置类别
У1
上站运行路径的坡度,不大于
2º
最高运行温度
плюс 45 °С
极限最低工作温度
минус 30 °С
根据 GOST 34017-2016 标准,上层站移动装置的运行模式
M4
上部空间站的负载能力(安装设备的质量),千克
150
上部空间站移动速度,米/秒
0-0,33
上部站移动范围,米
0-120
上站定位精度,毫米
± 10
根据 GOST 34017-2016 标准,下站提升机构的运行模式
M2
下站升降速度,米/秒
0-1
下站移动范围,米
0-10
下部工位的定位精度,毫米
线性推杆速度,米/秒
0-0,05
线性推杆的移动范围,米
0-0,5
执行器定位精度,毫米
± 5
从上站到下站的通信系统,类型
траковый
根据 GOST 34017-2016 标准,车厢升降机构的运行模式
М6
轿厢载重量(已安装设备的质量),公斤
50
小车升降速度,米/秒
小车移动范围,米
小车定位精度,毫米
从上站到滑架的通信进给系统,类型
功率,千瓦,不超过
15
MRP 重量(不包括附件),千克,不超过
2200
在利用现代数字工业技术和设备实现这些技术和设备的基础上,开发了一套技术和工艺解决方案,以提高工作效率,缩短工作时间,降低工作成本。
Заполните заявку и мы свяжемся с вами в ближайшее время.
填写申请表,我们会尽快与您联系。
Пожалуйста, введите данные для регистрации на сайте.
Пожалуйста, введите логин и пароль для авторизации на сайте







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}